作者申明:该文章仅在微信平台授权给公众号Datawhale(ID:Datawhale)首发原创(地址:https://mp.weixin.qq.com/s/jXSfMhDG5PdqG9o1jQikcw ),其他平台暂无授权。
训练目标检测模型并部署到你的嵌入式设备,让边缘设备长“眼睛”
目标检测的任务是找出图像中所有感兴趣的目标(物体),确定它们的类别和位置,是计算机视觉领域的核心问题之一。目标检测已应用到诸多领域,比如如安防、无人销售、自动驾驶和军事等。在许多情况下,运行目标检测程序的设备并不是常用的电脑,而是仅包含必要外设的嵌入式设备。别看嵌入式设备简陋,但在上面照样能够跑程序,实现我们的想法。设计一个嵌入式AI产品产品,一般会首先考虑成本,在有限的成本内充分利用硬件的性能。因此,不同高低性能的硬件使用场景各不同。
上篇我们讲到如何将一个基础CNN分类模型部署到K210芯片上,用来识别数字,如果还没看过,欢迎check这篇[1]文章~本篇是上一篇的延续,本文训练一个手势检测器,并将其部署到嵌入式设备上。
本文的思维导图如下

数据集准备
我们使用一个开源数据集平台:https://gas.graviti.cn/ ,这个网站汇总了AI开发者常见的公开数据集,针对我们特定任务,只需搜索对应的数据集即可,更方便的一点是,调用其SDK就能直接在线训练。
打开本文对应数据集链接 https://gas.graviti.com/dataset/datawhale/HandPoseforK210
右上角注册登录
fork数据集

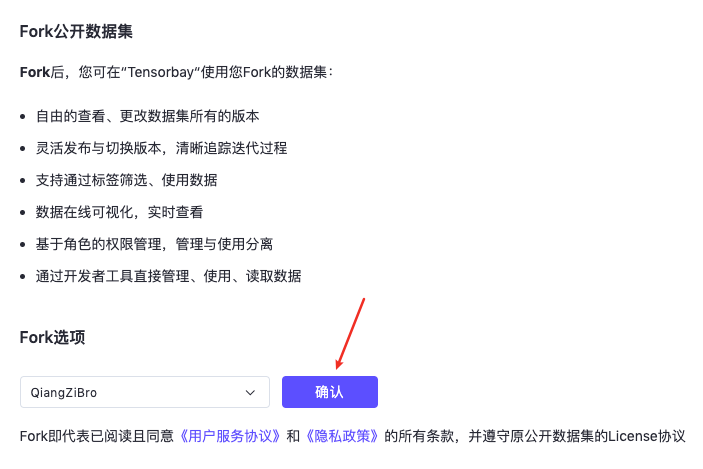
- 点击网页上方开发者工具,获取使用SDK所需的AccessKey,获取到 AccessKey 后,将其存在项目根目录的
gas_key.py里:
1 | KEY = "<Your-Key>" |
然后即可以通过AccessKey可以上传数据、读取数据、使用数据,灵活对接模型开发和训练,与数据pipeline快速集成。
- AccessKey写入后就可以自由读取数据了。读取前可以开启缓存功能,SDK会在读取data后将其自动缓存至指定路径,此处我们设置缓存路径为
data文件夹。
1 | import numpy as np |
目标检测模型训练
方法1 使用本地GPU进行训练
第一步:拉取docker镜像
1 | # 镜像名称 |
第二步:拉取本文代码,配置NNCASE,开启docker容器
1 | git clone https://github.com/QiangZiBro/pytorch-k210 |
上面的NNCASE只需要下载、解压即可,我们接下来使用Docker构建一个Linux虚拟容器环境,如下面命令开启环境:
1 | # 开启容器 |
开启容器后,有两种操作方式供选择
第一种,使用jupyter-notebook运行
第二种,直接进入容器内部
1
2
3
4docker exec -it jupyterlab-gpu /bin/bash
# 在容器内部,建议切换到普通用户运行
su - yourname
cd /tf
这里笔者选用第二种方式。创建容器时,Docker自动在镜像里创建了一个和本机用户名相同的用户。在容器里运行程序时,强烈建议切换成普通用户运行,否则后期遇到权限问题还需要手动改权限。
第三步:开启训练,使用Yolo V2算法数据集进行训练,具体操作方法为:
1 | # 安装必备的包 |
运行上述命令即使用maix_train工具箱开始训练,这个程序能一键完成训练、参数转换、量化等功能

使用100个Epoch进行训练,得到的结果生成在out文件下。
方法2 使用在线GPU进行训练
运行时默认调用GPU训练,如果没有GPU则使用CPU,训练时间相对CPU较慢。没有GPU的小伙伴也不用担心,可以直接将数据集上传到maixhub进行在线训练。这里的限制是需要有一块K210开发板,并且数据集大小在20M以内。下面简要介绍方法:
第一步,在格物汰数据集平台上,下载本文所用到的数据集

第二步,打开maixhub官网,https://www.maixhub.com/ModelTraining,注册、登录,根据官网提示获得机器码
第三步,上传刚才下载的数据集,开始训练
大概二十分钟后,模型就训练好了,点击Download下载训练的模型。这里的结果和上面的out文件夹下的压缩文件一样。

嵌入式设备部署
开发环境准备
使用kflash作为烧录工具,这个工具图形化和命令行工具都有,选取我们需要的即可
代码编写方面,使用VSCode编辑Python代码。模型训练好的Python代码还需要微调,这里笔者已经调试好公布在托管的仓库里,大家可以直接拷贝到内存卡,或者串口连接使用。下面介绍如何将训练的模型部署到最终的硬件设备中
烧录Micropython固件
第一步 下载Micropython固件 到https://dl.sipeed.com/shareURL/MAIX/MaixPy/release/master 下载一个bin文件,这里笔者使用的是minimum_with_kmodel_v4_support
1 | wget https://dl.sipeed.com/fileList/MAIX/MaixPy/release/master/maixpy_v0.6.2_72_g22a8555b5/maixpy_v0.6.2_72_g22a8555b5_minimum_with_kmodel_v4_support.bin |
第二步 查看K210的串口号,以笔者使用的MacOS为例:
1 | ls /dev/cu.usbserial-* |
第三步 烧录
使用命令行进行烧录示例
1 | kflash -p /dev/cu.usbserial-14330 -b 115200 -t maixpy_v0.6.2_72_g22a8555b5_minimum_with_kmodel_v4_support.bin |
使用kflash图形界面的烧录示例

烧录目标检测模型参数
有两种方式将训练模型参数部署到嵌入式设备上:
- 使用程序烧录器直接烧录到flash中的一片地址,在程序中直接加载这块地址指向的内存
- 将模型参数拷贝在SD卡上,在程序中从SD卡加载
对于第一种方法,我们一般将模型参数烧录在以0x30000为开始的内存上,结尾不需要制定,程序低层会自己判断结束点。因此,在烧录时,只需要在kflash GUI的0x00000改为0x30000即可。当然,你也可以使用命令行烧录,同样的效果。
对于第二种方法,直接将上面训练好的所用文件拷贝到SD卡,再插入K210开发板即可。
模型推理脚本
Micropython固件和模型参数烧录成功后,使用下面脚本便可以加载脚本,进行检测了。建议先打开串口,将程序复制过去运行,观察运行结果,调试到正常运行后再放置到SD卡中
第一步:复制下面代码
1 | # object detector boot.py |
上面代码有几点注意:
- 使用雅博的K210开发板需要在LCD初始化将invert参数置为True,即
lcd.init(type=1, invert=True) - main函数有两种运行方式,分别表示从flash加载模型和从SD卡加载模型
第二步:打开终端,Mac上可以使用screen和串口进行通信
1 | screen /dev/cu.usbserial-14340 115200 |
常用功能
退出: 先ctrl+a,再按k键,按y确认
如果成功出现下面结果

第三步:拷贝程序通过串口进行交互式运行
首先按Ctrl+E,进入拷贝模式,出现下面结果

复制后Ctrl+D即可开始运行,程序运行无误后,拷贝全部文件到SD卡。程序运行成功后,效果如下
总结和思考
本文提供了一个从图像深度学习算法训练的开始,最终将其部署在嵌入式设备K210上。嵌入式AI涉及到的知识广泛,光其中的目标检测和嵌入式编程都可各写一本书。如果你是一个初学者,不要被其中深厚的知识吓到,我们可以“边打仗边学习”,在实践的过程学习。
下面提供几个小问题,以供课后思考:
- 有哪些可能的方法能够提升识别的准确率?
- 能否从数据本身出发,提高识别的性能?
- 本文的神经网络参数的参数转换流程是怎样的?
参考资料
[ 1 ] : https://mp.weixin.qq.com/s/oTLPzmlChxoXDziurl38-Q
[ 2 ] : https://www.maixhub.com/